
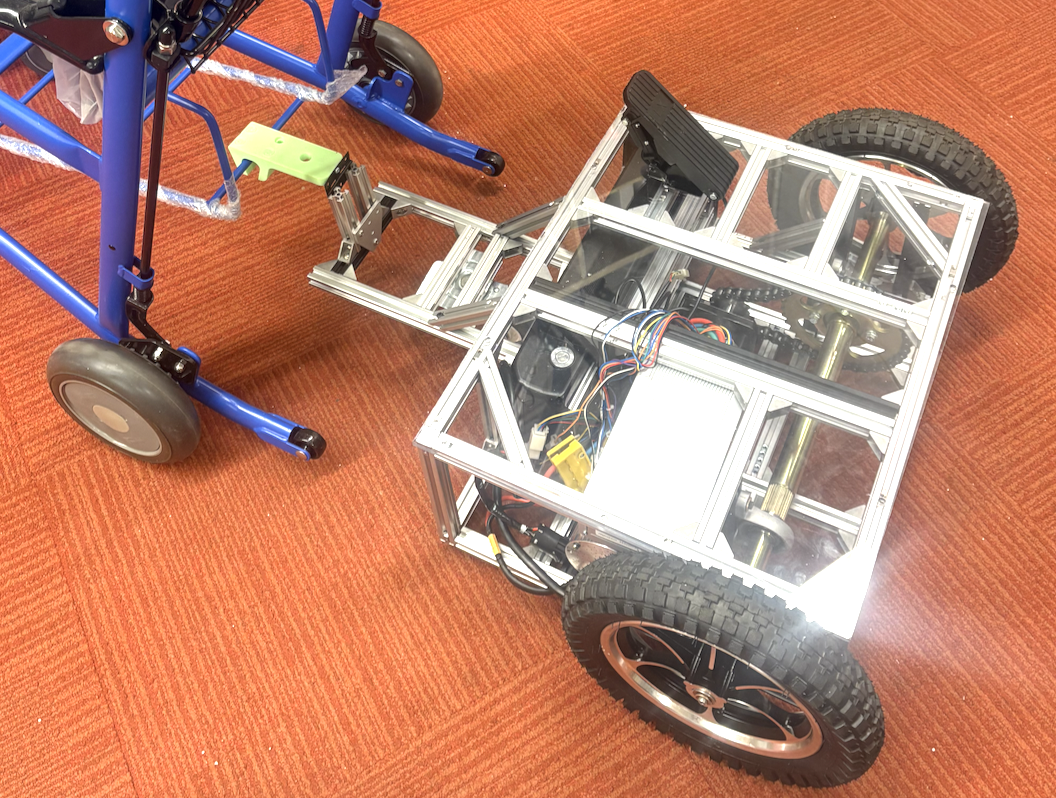
I’m currently co-leading the design and building of a detachable Segway-like powered tow for non-electric wheelchairs under Professor Hod Lipson in Columbia’s Creative Machines Lab. I’m helping manage our project by delegating work between research associates, budgeting project expenditures, communicating with MECE lab and Makerspace leaders for machining usage, and directly liaising with Professor Lipson. On the technical side I’m helping design CAD components and machine custom drivetrain parts, including steel axles, sprockets, and keyed interfaces with Lathe and Mill. I’ve also been fabricating the main frame by cutting, drilling, and assembling metal extrusions and polycarbonate panels. I’ve also helped install and integrate the motor, gear-shifter, battery, and controller to ensure full mechanical and electrical system functionality.
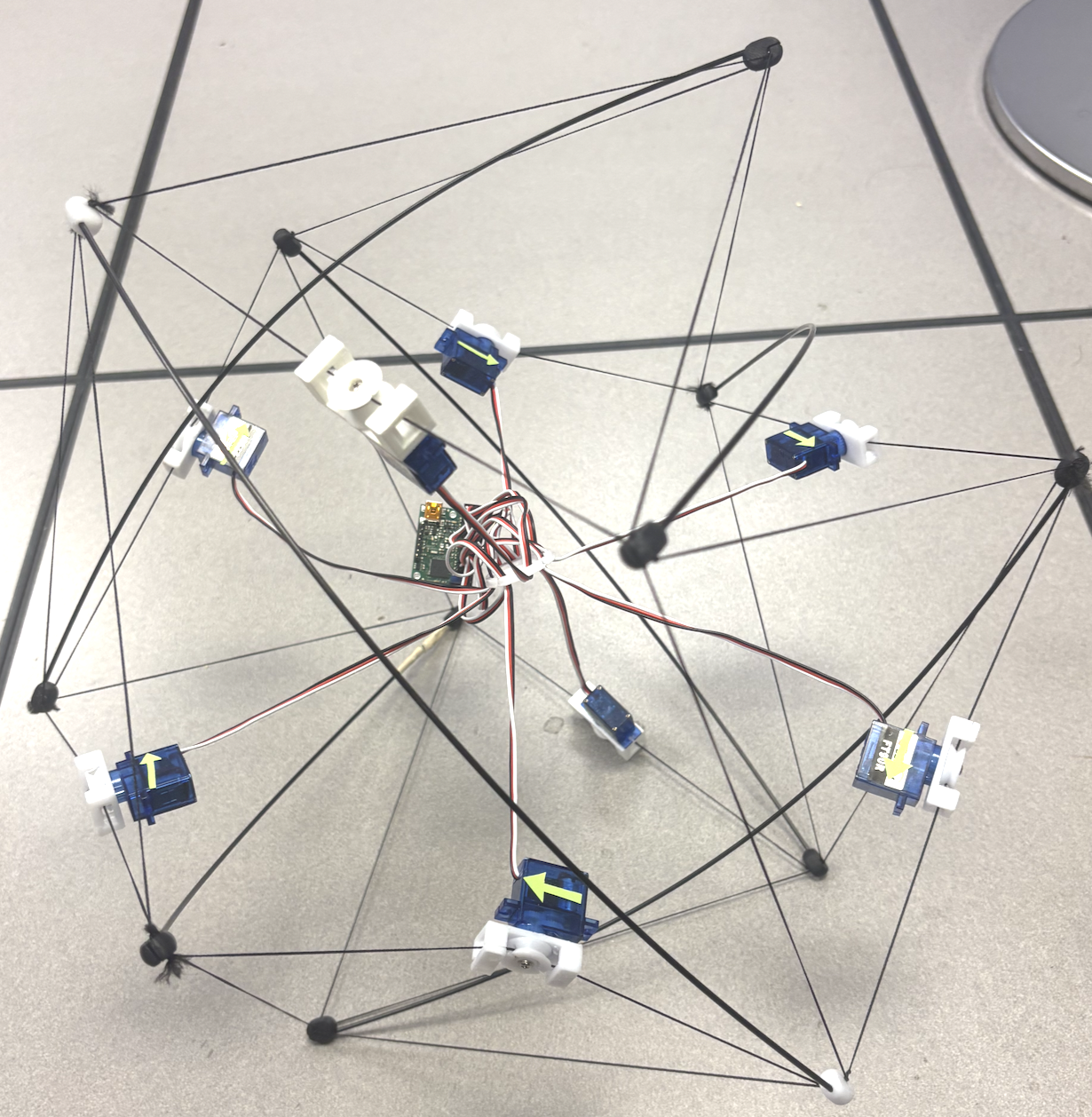
In the summer of 2025, I served as an engineering research intern at NASA’s Ames Research Center in Mountain View, California. Under the guidance of my mentor Adrian Aggogino, I contributed to the development of large-scale tensegrity structures aimed at planetary exploration and adaptive locomotion. My work centered on the mechanical design, fabrication, and integration of a human-scale, dynamically actuated tensegrity prototype capable of controlled movement via servo-driven cable contraction. I designed and 3D-printed custom enclosures for onboard electronics, tuned control sequences for synchronized actuation, and conducted extensive stress testing to optimize structural robustness and tension distribution. I presented my findings at the NASA Intern Poster Session and am currently co-authoring a research paper with my mentor to document and publish our results. This work supports the advancement of deployable robotic systems engineered to navigate unstructured terrain with resilience and adaptability.
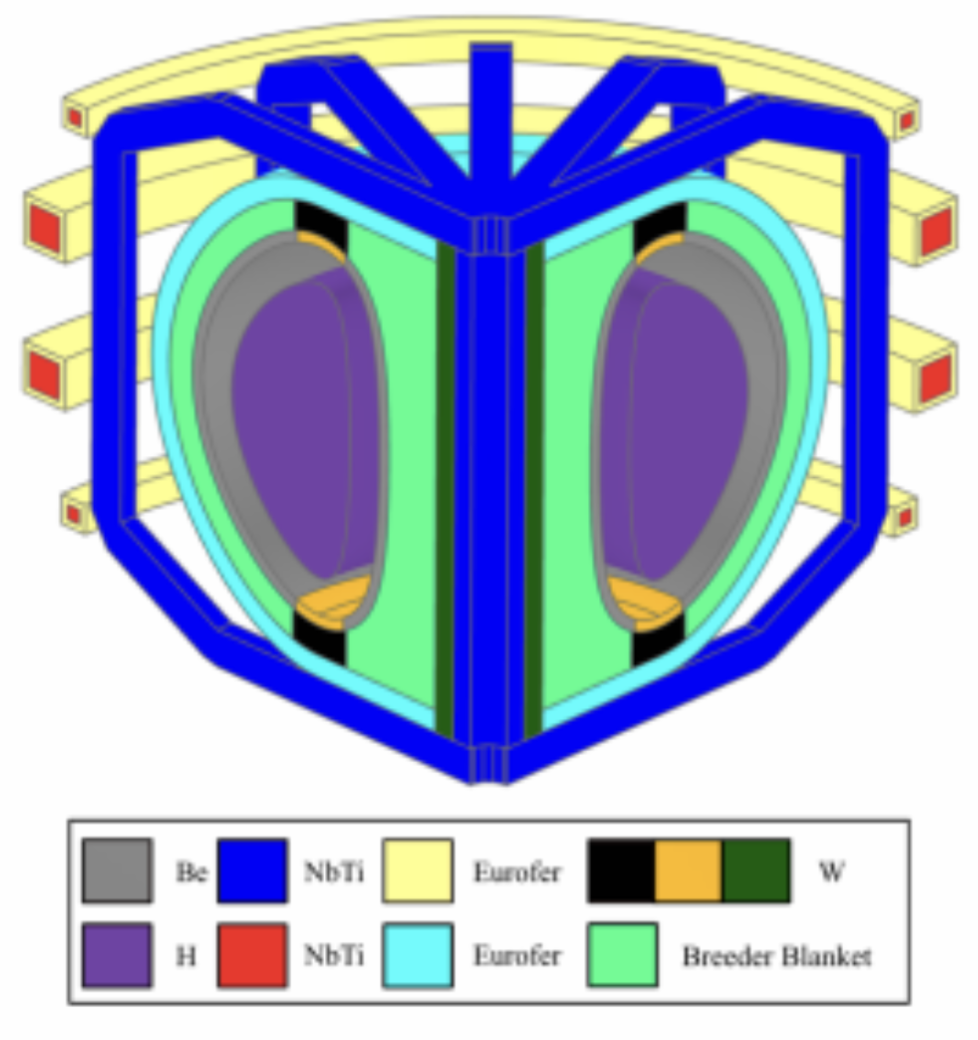
I conducted an independent research project to optimize tritium production in nuclear fusion tokamak reactors, aiming to advance the potential of clean, limitless energy. Using Python-based Monte Carlo simulations and a custom-designed 3D tokamak reactor model, I explored key variables such as breeder blanket material selection, blanket thickness, and lithium enrichment. I ran thousands of simulations, analyzing how different variables influence reactor efficiency and tritium self-sufficiency. Mentored by a Princeton University MSE, working as a Principal Nuclear Engineer at Princeton Stellarators, this work contributes to the development of zero-emission energy solutions for a sustainable future.
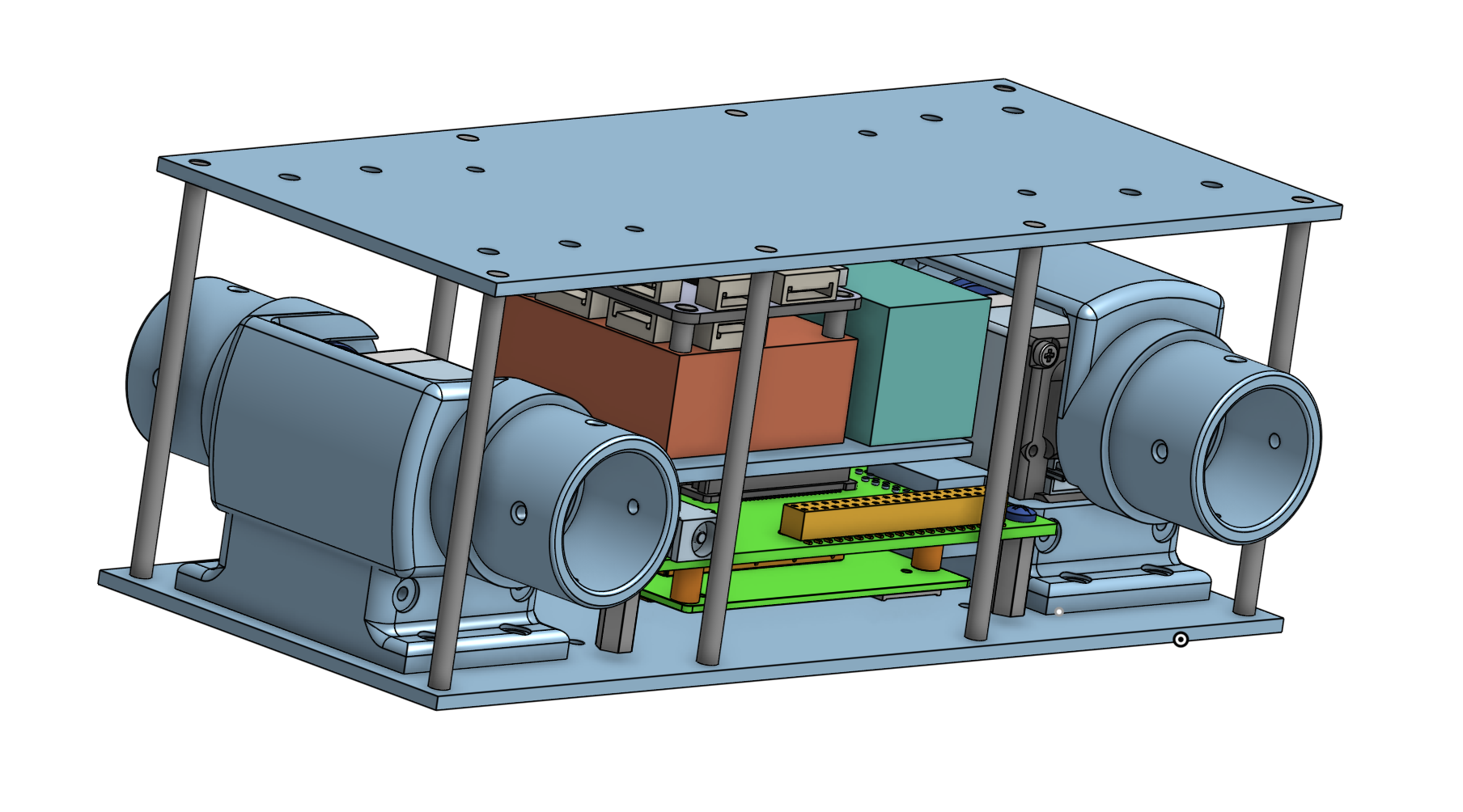
During the summer of 2025, I volunteered as a research contributor at UC Berkeley’s High Performance Robotics Lab, working on the next generation of the PairTilt quadcopter—a tilt-rotor drone designed to improve flight efficiency and agility through active motor tilting. My primary focus was on mechanical design and weight optimization of the drone’s frame, aiming to reduce rotational inertia without compromising structural integrity. I contributed to the redesign of the airframe using lightweight carbon fiber materials and iterative CAD modeling, and evaluated design trade-offs between durability, manufacturability, and agility. This work supports the development of more agile, efficient aerial systems for autonomous applications.
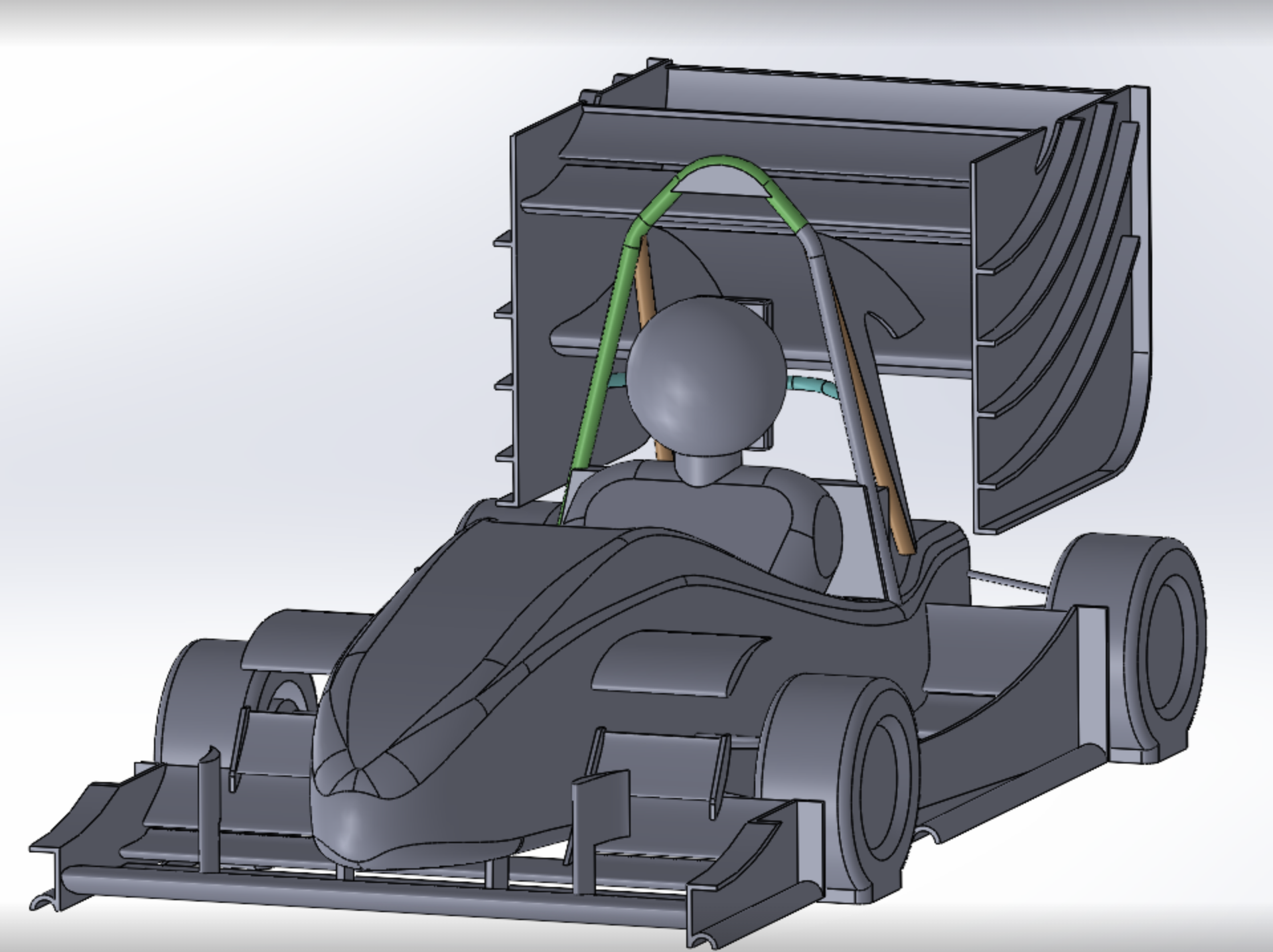
As a member of Columbia’s Formula SAE Racing Team, I contributed to the design and development of aerodynamic components for a student-built, open-wheel race car. My work focused on optimizing downforce and minimizing drag through iterative CAD modeling and aerodynamic analysis. I assisted in designing front and rear wings, undertray profiles, and diffuser geometry, while collaborating with teammates to ensure manufacturability and integration with the car’s chassis. I also supported material selection, CFD simulation setup, and preparation for physical prototyping. This experience deepened my skills in performance-driven design, teamwork, and applied engineering.